ExoMars: missione compiuta?

Quest’oggi, in mattinata, si è tenuta la conferenza conclusiva della serie dedicata alla missione congiunta ESA – Roscosmos ExoMars 2016. Ospiti dell’associazione studentesca AESA Torino, che ha organizzato la conferenza stessa il dott. Carlo Cassi, l’ing. Mario Montagna e l’ing. Stefano Portigliotti.
Missione ExoMars
ExoMars 2016: Lanciata il 14 Marzo 2016 ha portato in orbita marziana l’orbiter TGO[1] e sul pianeta il lander Schiaparelli. Questa è una missione dimostrativa col fine di testare le tecnologie necessarie a depositare in sicurezza un futuro payload sulla superficie marziana (Schiaparelli), raccogliere dati sull’atmosfera marziana, cercare tracce di gas legati alla vita e inserire in orbita marziana un relay per le future missioni. L’orbiter è di produzione Francese mentre il lander è di produzione Italiana;La missione ExoMars (Mars Exobiology) fa parte del programma ESA Aurora che si prefissa, tramite missioni via via più complesse a partire dal telerilevamento dell’ambiente marziano (ExoMars 2016) e dall’esplorazione robotica (ExoMars 2020), di portare l’uomo su Marte entro il 2030.
La missione in sé, di cui l’Italia è Program Lead, è a sua volta divisa in due parti: ExoMars 2016 ed ExoMars 2020:
- ExoMars 2020: Sarà lanciata nel 2020 e porterà sul pianeta un rover che si occuperà di dimostrare la fattibilità dell’esplorazione robotica di Marte, raccogliere campioni superficiali e fino a 2 metri di profondità, effettuare analisi in situ e verificare la presenza di acqua sotto la superfice mediante un radar. Inoltre si proveranno sul campo motori throttleable[2] per la fase di atterraggio e si validerà il sistema radio deep space.
Il payload di questa missione è chiamato Rover Surface Platform (RSP) formato dal Carier Module e dal Descent Module, che già da solo pesa 2 tonnellate, a sua volta contenente la Landing Platform e, finalmente, il rover. Il CM è di produzione Tedesca, il DM è una collaborazione Russo-Italiana e il rover Anglo-Italiana. Il centro di controllo del rover (ROCC) è in fase di preparazione presso la Altec di Torino.
ExoMars 2016
Il Composite, il payload della missione, è composto dall’orbiter TGO, dal lander Schiaparelli e dal Main Separation Assembly (MSA). Quest’ultimo componente, dalla massa di 50 kg, fa da interfaccia tra i due moduli ed è incaricato di lanciare, con un sistema a molla, l’EDM nel momento del distacco dal TGO, variandone la velocità rispetto a quella dell’orbiter di pochi gradi e conferendogli uno spin di 15°/s.
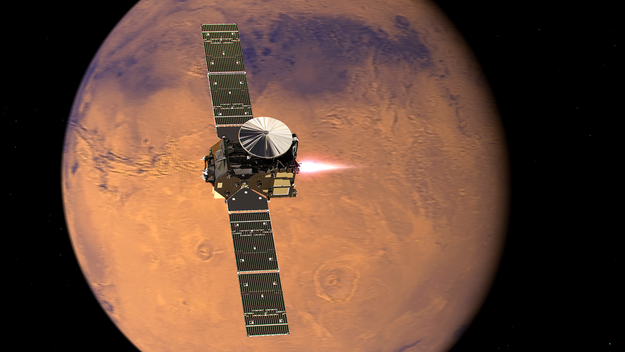
Trace Gas Orbiter
L’orbiter è un satellite di dimensioni 3.2 x 2 x 2 m e massa al lancio di quasi 4 tonnellate. Di queste, escludendo EDM (576 kg) e MSA, solo 112 kg sono strumentazione scientifica (payload) e il restante, quasi 2,5 tonnellate, è propellente sufficiente a garantirne il funzionamento per un periodo ben maggiore della vita operativa prevista per la macchina.
Alcuni componenti e tecnologie in dettaglio:
- Payload Deck: Un supporto per tutti gli strumenti scientifici che ha il compito di orientarli nella stessa direzione in modo che possano effettuare osservazioni della stessa zona e permette di compensare le dilatazioni termiche dovute all’ambiente spaziale. Su questa piattaforma sono presenti anche gli star tracker, che insieme ai giroscopi permettono di localizzare e orientare la piattaforma e il satellite;
- Solar Array: pannelli solari da 17 m che forniscono potenza allo spacecraft, insieme a una batteria da 5100 Wh. I pannelli sono montati su di un supporto rotante in modo da garantire la massima potenza (che raggiunge i 2kW nella migliore delle condizioni) indipendentemente dall’orientamento del satellite;
- High Gain Antenna (HGA): antenna con un diametro di 2,2 m, ad alto guadagno, utilizzata per lo scambio di dati con il centro di controllo a terra. Ha un guadagno di 40 Db solamente grazie alla forma e ha una potenza di trasmissione di 60 W, pagati con la necessità di un contatto visuale tra antenna ricevente e trasmittente. Per fare in modo che la trasmissione sia indipendente dalla posizione dello spacecraft l’antenna ha la possibilità di muoversi con un’elevazione compresa tra -26° e +155° e un azimut di ±64°;
- X Band LGA[3]: antenna a basso guadagno utilizzata nel caso in cui quella ad alto guadagno dovesse smettere di funzionare (come nel caso dell’entrata in Safe Mode). Ha una potenza di 60 W, un guadagno massimo di 5 Db, 7 GHz in Upload e 9 GHz in Download. Le tre emittenti sono posizionate in modo di avere la maggiore copertura possibile;
- Antenna UHF[4]: utilizzata per la comunicazione con il materiale a terra e compatibile con i sistemi di comunicazione di lander e rover ExoMars e con diversi altri sistemi presenti sulla superficie di Marte, come i rover NASA;
- Attitude Thrusters: piccoli motori bi-propellente con una spinta di 20 N utilizzati per effettuare piccole manovre di transizione e rotazione quando le reaction wheels non bastano. Sono montati in modo da permettere attuazioni force-free[5];
- Main Engine: grosso propulsore da 424 N utilizzato per le due grandi manovre orbitali effettuate dal satellite, la Deep Space Maneuver e il Mars Orbit Inserction.

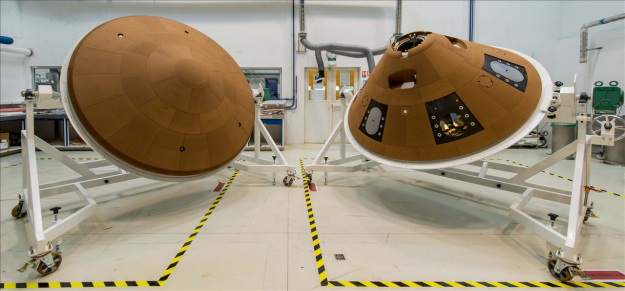
Lander Schiaparelli
L’EDM è la parte dimostrativa della missione, ha il compito di validare le tecnologie da utilizzare per la parte futura della missione. Il lander ha un diametro di 2,4 metri ed è equipaggiato con due scudi termici, anteriore (FS[6]) ablativo (sughero e resine) e posteriore (BS[7]), che racchiudono la Surface Platform. Inoltre lo scudo posteriore è funge da antenna UHF, un’implementazione necessaria a fornire la telemetria anche mentre il lander girava su sé stesso, condizione in cui un’antenna tradizionale non avrebbe avuto la stessa efficienza. Sopra lo scudo termico superiore è montato il paracadute e il suo meccanismo di apertura.
La Surface Platform (SP) è il cuore del Lander e ospita tutti i sistemi necessari all’atterraggio e, separatamente al centro, la Central Bay, che ospita tutti gli strumenti che avrebbero dovuto accendersi dopo l’atterraggio. Sotto la SP è posizionato il radar-altimetro a effetto Doppler e una crashable structure in sandwich di alluminio e fibre di carbonio pensata per attutire l’impatto dell’atterraggio. In particolare sulla Surface Platform sono installati:
- Tre gruppi di tre thrusters atti a rallentare l’EDM nell’ultimo tratto di discesa. Si tratta di propulsori mono-propellente (idrazina) i cui unici comandi sono di accensione e spegnimento;
- Tre serbatoi di Idrazina per i motori e uno di elio per pressurizzarli;
- I giroscopi necessari a fornire i parametri inerziali ai computer di bordo;
- Una batteria necessaria per il viaggio dalla separazione del TGO fino all’atterraggio affiancata da una batteria di picco necessaria a fornire l’impulso alle cariche pirotecniche utilizzate per separare i vari componenti del lander durante la discesa (FS – BS – SP).
Nella Central Bay invece prendevano posto:
- I computer;
- L’antenna omnidirezionale da utilizzare una volta arrivati a terra;
- La batteria da utilizzare a terra, non ricaricabile poiché l’arrivo previsto per Schiaparelli era durante una global dust storm che avrebbe reso inutili eventuali pannelli solari installati e per via del fatto che la missione scientifica sulla superficie era prettamente temporanea, con una durata prevista di una manciata di giorni.
Il montaggio di tutta l’apparecchiatura, come per le altre macchine per l’esplorazione planetaria, è avvenuto in particolari camere o aree, chiamate “camere bianche” (normativa ISO 7), in cui la presenza di contaminanti terrestri e polveri è ridotta al minimo, in modo da non trasportare materiale biologico alieno su altri pianeti ed evitare l’accumulo di polveri che potrebbero causare malfunzionamenti.
Fasi missione 2016
Dal momento del lancio fino al termine vita, il composite prima e i due moduli poi, hanno affrontato e dovranno affrontare tutta una serie di manovre necessarie allo svolgimento della missione a loro assegnata.
A seguire le fasi passate e future della missione 2016:
- Lancio: avvenuto mediante un vettore Proton fornito dall’agenzia spaziale russa (ROSCOSMOS);
- Crociera interplanetaria: durante questa fase è avvenuta la prima grande accensione del motore del composite, la Deep Space Maneuver, con cui la sonda si è diretta verso il pianeta Rosso;
- Rilascio lander: a circa 850 000 km da Marte Schiaparelli si è separato dal TGO con un certo angolo rispetto alla traiettoria del composite per poter entrare direttamente nell’atmosfera marziana;
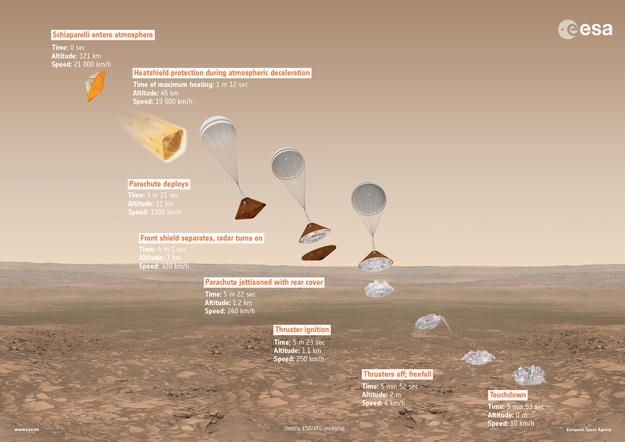
- EDL: dopo tre giorni di viaggio l’EDM è arrivato all’EIP[8] posizionato 120 km sul riferimento marziano con un angolo di circa 14° rispetto l’orizzonte e dopo 6 minuti avrebbe dovuto atterrare sulla superfice, azzerando la sua velocità di ingresso di 21 000 km/h;
- Orbita 4-sol[9]: Una volta raggiunto il pianeta l’orbiter ha effettuato la manovra MOI[10] per immettersi in un’orbita marziana di periodo 4 sol;
- Science & Relay Orbit: nei prossimi mesi la sonda raggiungerà la sua orbita definitiva mediante aerobraking, per risparmiare carburante, per poi mantenerla fino al termine vita nel 2022 con lievi aggiustamenti orbitali dal ridotto consumo di propellente (pochi grammi a settimana).
Telemetria
L’adozione di un robusto sistema di telemetria è fondamentale per evitare il ripetersi di eventi simili a quello che ha interessato il lander Beagle 2, lanciato nel Giugno 2003 insieme alla sonda Mars Express: fino al momento dell’EDL la missione era proceduta nominalmente e fino all’atterraggio il lander non avrebbe dovuto inviare dati, dopo giorni nell’attesa di un contatto con la Terra si è scoperto che la macchina si era schiantata sul suolo marziano.
Il problema maggiore di questa missione è stato che per tutto il tempo il lander non ha inviato segnali di telemetria, quindi non ha potuto riportare alcuna informazione a terra lasciando tutt’ora ignota la causa del fallimento.
Su Schiaparelli invece è stato integrato un sistema di telemetria completa che inviava a terra i dati che riguardavano l’EDL, eccetto per il periodo di discesa in cui era avvolto dal plasma che ne impedivano la trasmissione. I dati ottenuti tramite telemetria sono il lascito del lander e su questi sono state fatte le analisi finali.
La trasmissione aveva una velocità di 8 kbit/s con una frequenza di 10 Hz: valori piuttosto limitati considerando che le trasmissioni terresti attuali si attestano intorno ai 5 Mbit/s. All’interno di questa banda minima prendono posto le informazioni in presa diretta di alcuni dei sensori del lander, mentre gli altri dati erano archiviati nella memoria della macchina e sarebbero stati trasmessi in seguito.
La telemetria ha rivelato i seguenti fatti, qui divisi per le varie fasi di volo:
- Separazione (SEP): l’MSA ha avuto un’efficienza al lancio del Lander maggiore di quella nominale, fornendo una velocità di lancio superiore del 4%, questo ha portato a una differenza di circa 500 m del punto di impatto dal bersaglio previsto per l’atterraggio;
- Entry: Durante la fase di entrata in atmosfera il rallentamento era affidato all’attrito con l’atmosfera. Il calore generato da questa operazione è stato dissipato dallo scudo termico ablativo posto anteriormente. Durante questa fase la macchina ha attraversato una fase di blackout causata dallo strato di plasma che impediva le trasmissioni. All’uscita dal blackout si è registrato il massimo carico, pari a 8,15 g;
- Descent; la fase di discesa è stata inizialmente rallentata da un paracadute supersonico di 12 m di diametro e, per l’ultimo tratto, dai propulsori accoppiati al radaraltimetro posizionato sotto il lander. La parte paracadutata si è svolta nominalmente, mentre il problema che ha portato al crash del sistema è occorso durante la discesa controllata dai propulsori. Nonostante il funzionamento nominale di questi, dopo tre letture corrette il radaraltimetro ha inviato una lettura negativa (-2 km) al computer che ha reagito spegnendo i propulsori prima del tempo;
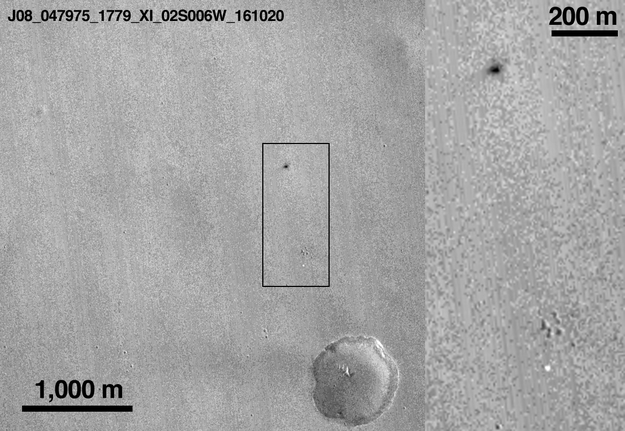
- Landing/Crash: l’atterraggio era demandato a una struttura collassabile che avrebbe dovuto assorbire la caduta di 2 m e quindi una velocità terminale di circa 3 m/s. Invece, a causa del problema descritto in precedenza, la velocità terminale della macchina è stata di circa 150 m/s, decisamente troppo elevata per la struttura collassabile;
- In generale si è potuto notare una lieve dissimmetria nello spin rate del Lander, senza però conoscerne il massimo valore a causa del blackout dovuto al plasma. Tuttavia si sa che la cosa non ha influito in alcun modo sul funzionamento della macchina.
Conclusioni
Innanzitutto va detto che la missione del lander si è dimostrata compiuta per ben due terzi: solo la parte finale (L) dell’EDL è stata fallimentare, mentre tutte le altre si sono svolte perfettamente.
Detto questo si può affermare che l’incidente si sarebbe potuto evitare applicando il principio della Single Failure Tolerance, considerato non necessario vista la natura puramente dimostrativa della macchina.
Note:
[1] TGO: Trace Gas Orbiter, il satellite della missione ExoMars 2016
[2] Propulsori throttleable: propulsori con controllo della potenza (throttle = manetta)
[3] LGA: Low Gain Antenna, antenna a basso guadagno
[4] UHF: Ultra High Frequencies, metodo di trasmissione radio ad alta frequenza
[5] Attuazioni force-free: utilizzo dei motori orbitali in modo da generare solamente coppie e non forze
[6] Front Shield: scudo termico frontale
[7] Back Shield: scudo termico posteriore
[8] EIP: Entry Insertion Point, punto di entrata in atmosfera marziana
[9] Sol: giorno marziano (24h 39’ 35,244”)
[10] MOI: Mars Orbit Insertion, manovra orbitale retrograda effettuata per inserirsi in orbita marziana dopo il viaggio interplanetario
Il presente scritto è un sunto degli interventi tenuti dai relatori durante la conferenza “ExoMars: missione compiuta?” organizzata dall’associazione studentesca AESA Torino e tenutasi Venerdì 10 Marzo 2017 presso la Sala Consiglio di Facoltà del Politecnico di Torino.
| Dott. Carlo Cassi: coordinatore per Thales Alenia Space delle attività di sistema della missione ExoMars 2016, seguendo in particolare la progettazione del composite[1], l’analisi di missione e le interfacce con il lanciatore, nonché l’implementazione delle interfacce meccaniche, elettriche e funzionali tra orbiter e lander.
Ha guidato il team di progetto italo-francese presso Darmstadt durante le operazioni di volo. Attualmente è responsabile del gruppo “System Engineering Management” e “Design Authority” per l’esplorazione robotica nella sede Thales di Torino. |
Ing. Mario Montagna: ha seguito la definizione dell’architettura avionica del composite per Thales Alenia Space, in particolare delle varie fasi di implementazione dal data handling e delle comunicazioni del lander, dalla progettazione di dettaglio fino alla verifica finale.
Ha eseguito i test di tutte le funzionalità dell’EDM[1] e coordinato il team di progetto avionico durante la campagna di lancio a Baikonur. Attualmente è il responsabile del gruppo “Avionic, Data, System & Comunications design” presso la sede Thales di Torino. |
Ing. Stefano Portigliotti: coordinatore di tutte le attività EDL del lander per Thales Alenia Space, seguendo tutti gli aspetti inerenti il volo e la sua simulazione e alla selezione e verifica del sito di atterraggio.
Ha inoltre seguito lo sviluppo dei sottosistemi di paracadute, protezione termica e propulsione, supervisionando i test sul campo del radar-altimetro. Attualmente fa parte dello Staff Team del gruppo “System Design” della sede Thales di Torino, ricoprendo la funzione di coordinatore delle verifiche per il modulo di discesa per la missione ExoMars 2020. |